Mask R-CNN简析(转)
本博客引用自这里。
1 简述
Mask R-CNN是一个小巧、灵活的通用对象实例分割框架(object instance segmentation)。 它不仅可对图像中的目标进行检测,还可以对每一个目标给出一个高质量的分割结果。它在Faster R-CNN[1]基础之上进行扩展, 并行地在bounding box recognition分支上添加一个用于预测目标掩模(object mask)的新分支。该网络还很容易扩展到其他任务中,比如估计人的姿势, 也就是关键点识别(person keypoint detection)。该框架在COCO的一些列挑战任务重都取得了最好的结果,包括实例分割(instance segmentation)、 候选框目标检测(bounding-box object detection)和人关键点检测(person keypoint detection)。
2 结构
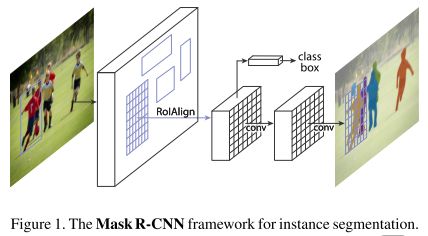
一共可以分为两个分支:
(1)第一个分支为原始Faster R-CNN的结构,它用于对候选窗口进行分类和窗口坐标回归。
(2)第二个分支对每一个感兴趣区域(Region of Interest,RoI)预测分割掩模,它利用了一个小的全卷积网络结构[2](Fully Convolutional Network,FCN)。
3 主要关键因素
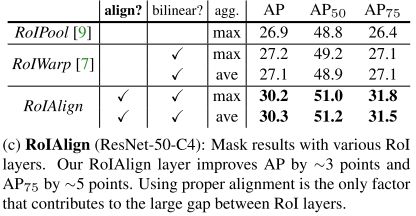
关键点1:解决特征图与原始图像上的RoI不对准问题
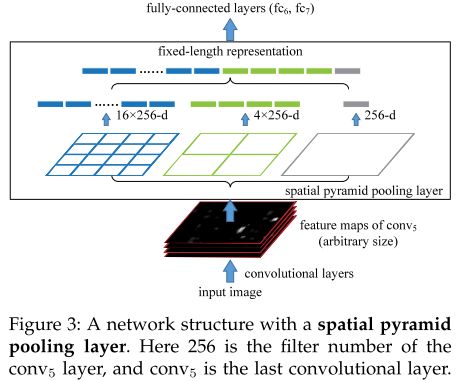
问题描述:RoIPool[3]是一种针对每一个RoI的提取一个小尺度特征图(e.g. 7x7)的标准操作,它用以解决将不同尺度的RoI提取成相同尺度的特征大小的问题。 RoIPool首先将浮点数值的RoI量化成离散颗粒的特征图,然后将量化的RoI分成几个空间的小块(spatial bins),最后对每个小块进行max pooling操作生成最后的结果。 该操作类似于下图,但只取了一个尺度。
通过计算[x/16]在连续坐标x上进行量化,其中16是特征图的步长,[ . ]表示四舍五入。这些量化引入了RoI与提取到的特征的不对准问题。由于分类问题对平移问题比较鲁棒, 所以影响比较小。但是这在预测像素级精度的掩模时会产生一个非常的大的负面影响。
解决方案:作者提出RoIAlign层来解决这个问题,并且将提取到的特征与输入对齐。方法很简单,避免对RoI的边界或者块(bins)做任何量化, 例如直接使用x/16代替[x/16]。作者使用双线性插值(bilinear interpolation)在每个RoI块中4个采样位置上计算输入特征的精确值,并将结果聚合(使用max或者average)。
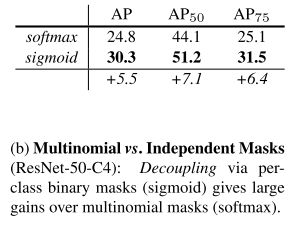
关键点2:将掩模预测和分类预测拆解
该框架对每个类别独立地预测一个二值掩模,没有引入类间竞争,每个二值掩模的类别依靠网络RoI分类分支给出的分类预测结果。这与FCNs不同, FCNs是对每个像素进行多类别分类,它同时进行分类和分割,基于实验结果表明这样对于对象实例分割会得到一个较差的性能。
下面介绍一下更多的细节,在训练阶段,作者对于每个采样的RoI定义一个多任务损失函数 ,前两项不过多介绍。
掩模分支对于每个RoI会有一个
,前两项不过多介绍。
掩模分支对于每个RoI会有一个 维度的输出,它编码了K个分辨率为mxm的二值掩模,分别对应着K个类别。
因此作者利用了a per-pixel sigmoid,并且定义
维度的输出,它编码了K个分辨率为mxm的二值掩模,分别对应着K个类别。
因此作者利用了a per-pixel sigmoid,并且定义 为平均二值交叉熵损失(the average binary cross-entropy loss)。
对于一个属于第k个类别的RoI,仅仅考虑第k个mask(其他的掩模输入不会贡献到损失函数中)。
这样的定义会允许对每个类别都会生成掩模,并且不会存在类间竞争。
为平均二值交叉熵损失(the average binary cross-entropy loss)。
对于一个属于第k个类别的RoI,仅仅考虑第k个mask(其他的掩模输入不会贡献到损失函数中)。
这样的定义会允许对每个类别都会生成掩模,并且不会存在类间竞争。
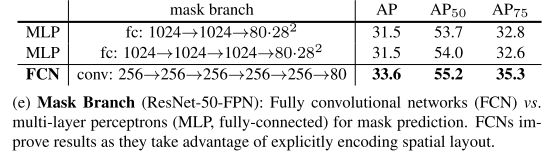
关键点3:掩模表示
一个掩模编码了一个输入对象的空间布局。作者使用了一个FCN来对每个RoI预测一个mxm的掩模,这保留了空间结构信息。
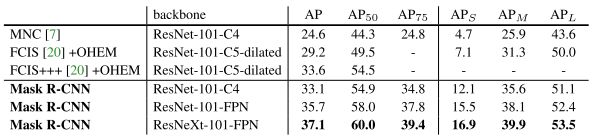
对于以上几个关键点,作者在表格2中给出了详细的性能比较。
针对关键点1:
针对关键点2:
针对关键点3:
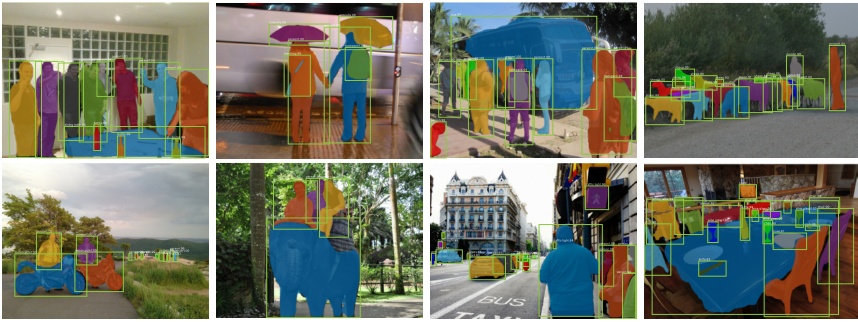
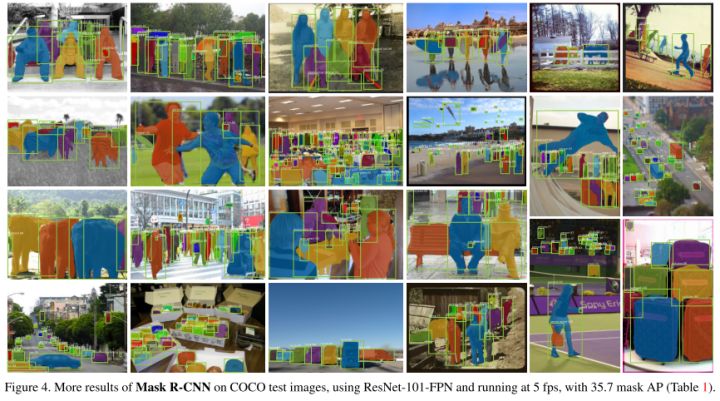
4 结果展示与性能对比
5 参考文献
[1] Faster R-CNN: To- wards real-time object detection with region proposal net- works. In NIPS, 2015.
[2] Fully convolutional networks for semantic segmentation. In CVPR, 2015.
[3] Fast R-CNN. In ICCV, 2015.
谢谢观看,希望对您有所帮助,欢迎指正错误,欢迎一起讨论!!!

感谢您的支持,我会继续努力的!


打开微信扫一扫,即可进行扫码打赏哦